Modular Robots, v2
Tags: distributed, modular, nasa, robots, vision
After I finished buiding the dozen or so modules of my first modular robot system at NASA, it was time to take the lessons learned and design the second version. There were three major lessons.
The first was that the module weight-to-torque ratio is the critical limiting factor in determining the complexity you can achieve with this sort of chain-like modular robot. So I selected some beautiful brushless pancake motors and a gorgeous holonomic gearbox that would let us build a more serious hinge module.
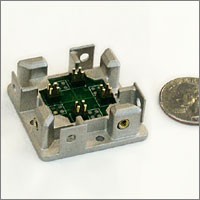
 The second lesson was that the gendered connectors on the first-generation modules, while not strictly limiting the configuration space, were inconvenient and unnecessary. The top picture shows the ambidextrous connector that I designed for the second generation. After a couple of manufacturing iterations, I was quite happy with how it turned out.
The second lesson was that the gendered connectors on the first-generation modules, while not strictly limiting the configuration space, were inconvenient and unnecessary. The top picture shows the ambidextrous connector that I designed for the second generation. After a couple of manufacturing iterations, I was quite happy with how it turned out.
The final lesson was that heterogeneity really is the way to go: the traditionalal modular robotic model involves building robots out of very large numbers of identical components, but that is unnecessarily constraining. For this generation, I added a wheel module and a camera module.
 I thought the wheel module was quite clever: the motor and control electronics are all tucked inside the hub, making it extremely compact. With wheels you can build traditional rovers, and more importantly you can explore reconfigurable morphologies that drive over flat terrain but can walk over rough terrain.
I thought the wheel module was quite clever: the motor and control electronics are all tucked inside the hub, making it extremely compact. With wheels you can build traditional rovers, and more importantly you can explore reconfigurable morphologies that drive over flat terrain but can walk over rough terrain.
The camera module also used a cute trick: the video signal was sent back wirelessly to the controlling computer system, so we could keep the ad hoc network running between the modules themselves simple and low-bandwidth.
Alas, the funding for this research was cut as the Agency reorineted itself in response to Bush‘s new Vision for Space Exploration, and I was never able to fully complete this second-generation modular robot.



